Projects
2020 China Robot Competition UAV Challenge
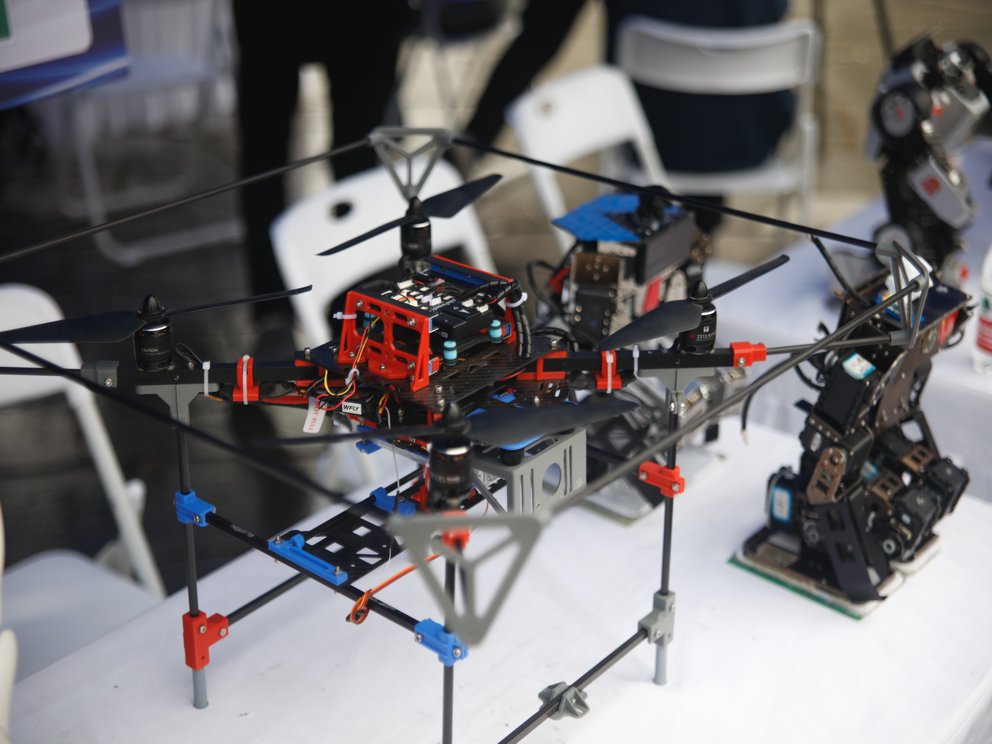
In this competition, we designed a logistics UAV with target recognition and delivery capabilities. We used it to participate in the delivery and target recognition competitions of the UAV Challenge, and achieved the third place in both.
This is the UAV we used for the competition:


My work:
- Responsible for all target recognition tasks of three sub-events(UAV Delivery, UAV Target Identification, and UAV Cruise) and help our team to 3rd place in UAV Delivery and UAV Target Identification.
- Use C++ and Python as programming languages, combined with OpenCV vision library, ROS, traditional vision algorithms and deep learning techniques to solve problems.
- Solve the problems of world coordinate conversion, target recognition and positioning, QR code identification, communication between vision node and UAV strategy center node, etc.
Related informatin:
2021 China Robot Competition UAV Challenge
Next year, the competition rules have been updated and our UAV have been updated too. The competition introduced new requirements for target recognition.
Our new UAV:

My work:
- For the new target recognition task, I first try traditional template matching, histogram matching, and SIFT feature matching algorithms, but the results were not good.
- In the end, I switched to a deep learning algorithm based on Yolov5. I created our dataset, tuned the parameters several times and finally trained a excellent model that achieved over 96% confidence in real-world tests.
Related information:
RUMA
RMUA(RoboMaster University AI Challenge ) is a fully autonomous robot competition in which teams work together to complete tasks such as control, navigation, target recognition, and strategy. After six months of hard work, we participated in RMUA for the first time and make good performance. Now we are working hard to improve the overall performance of the robots.
My work:
Wrote half of the competition vision technical proposal and technical report, in which a method of using open source 3D vision algorithm for pose recognition is proposed to predict the movement of enemy. Finally, our technical proposal won the 2nd prize.
Solve the problem of the vision code deployment environment on the on-board platform and the communication between the two vision nodes.
Related information:
- [ Official Website(English)] or [ Official Website(Chinese)]
- [ Video on Youtube] or [ Video on Bilibili]
National Robot Championship Intelligent Operation Competition of Aerial Robot
This was the first time our UAV flew in a large outdoor environment, and the first time I tried to do target recognition outdoors.
Some images:



My work:
- By parameter tuning, my vision algorithm can still work outdoors.
Team Coursework
1. FairyRogue
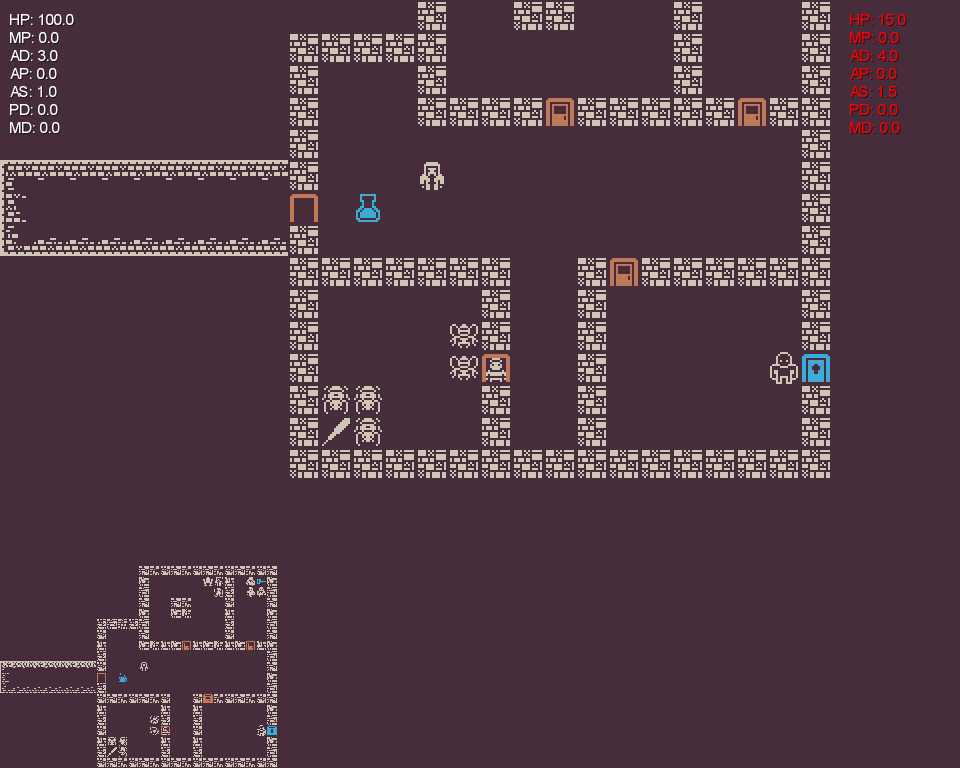
A pixel style rouge-like game based on the Java programming language.
- Through this project, I have improved my teamwork and object-oriented development skills, as well as my software engineering modeling skills.
2. FairyHR
A web project based on Spring. It has online attendance and leave function, which can help companies to manage human resources online.
- Through this project, I have improved my web development and server-side development skills.